
在障碍物规避方面,智能巡检机器人在运行的过程中还能够实时进行障碍检测,在AI识别能力的搭配工作下完成动态避障,从而确保安全工作。
华为一年一度的开发者盛宴HDC.Cloud2021于4月底在深圳大学城举办。由华东师范大学beat365手机中文官方网站智能机器人运动与视觉实验室,联合华为昇腾AI团队和东莞松灵机器人携手打造的智能工业巡检机器人,在本次的HDC.Cloud的展台上吸引了众多的目光,牢牢占据着C位。

这款智能工业巡检机器人是三方合作团队,在华东师范大学张新宇教授发起的“支持大规模荒漠生态恢复机器人系统”研究基础上,面向更多复杂工业场景的一次尝试和探索。在HDC展会现场由张新宇带队,学院研究生孙淳、巩科两位同学和华为昇腾AI部门的同事现场为参会者演示和解说。
这款智能工业巡检小车的特别之处在于,它是一台可以自动识别、无接触读取各行业多类仪表的智能帮手。在能源、工业、水利等事关国计民生的重要行业中,仪表都是产业中不可或缺的一部分,读表抄表也是很多人最重要的工作。然而在现实中,人工抄表读表很难完全避免遗漏。同时,抄表在很多时候是非常危险辛苦的工作,比如荒漠、高山中的变电站,需要巡检人员辛苦跋涉才能完成一次抄表;比如高压电站、水电站的工作场景,抄表员会冒着很大的安全隐患完成抄表工作。
那么这种工作让机器来完成行不行呢?
理论上来说当然可以,但AI识别仪表在实际操作中面临很多挑战。比如仪表的种类繁多、数值复杂,缺乏充沛的AI计算能力很难处理。而且暴露在复杂环境下的仪表,可能有不同程度的磨损老化,这就需要读取时终端能够理解场景,建立应急决策机制,自动化处理仪表识别中可能发生的种种问题。

另一方面,读取终端需要尽量保证在无接触的准确距离上完成读取,并且确保不会误触误碰其他设备,这就对终端的导航和规避行动能力提出了挑战。

基于昇腾基础软硬件平台,这台智能工业巡检小车可以在不同场景完成巡检任务。在现场的演示中,它可以准确停靠在不同仪表面前,保持精准距离快速读取,并且自动巡航到下一场景继续工作。值得注意的是,面对那些被预先设置为不可靠近的区域,巡检机器人也会自行规划路线远离该区域,从而实现在现实中的复杂工业场景完成巡检、读取仪表任务。
面对真实的巡检场景,这台智能小车的“神奇”之处可以拆分成三大能力:识别、导航、障碍规避。

在识别方面,华东师范大学智能机器人团队开发了基于昇腾CANN异构计算架构,结合DBNeT、CRNN、YOLOv5等多种主流识别算法,从而可以确保多种仪表,比如压力计、温度计、数显温度计、磁翻板液位计与多种警示牌的准确读数和识别。

当然,仅仅拥有对主流仪表的识别能力并不够。由于昇腾基础硬件本身提供丰富的可编程接口与相应软件,可以随时根据不同识别任务调整目标,能够实现快速开发、快速验证。华东师范大学智能机器人团队还开发了相应的交互方式,巡检机器人可以一键启动自动完成定时巡检,无需人工参与或遥控。
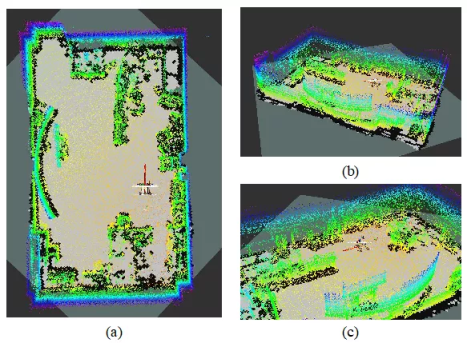
在导航方面,智能巡检机器人利用多线激光雷达完成工业场景的三维地图构建,实现在复杂的工业场景中实时定位,进而自动规划巡检路线。
在这智能三重奏的叠加下,即使非常复杂的现场作业环境、工业仪表,智能巡检机器人也能轻松准确地完成读取识别。


华东师范大学beat365手机中文官方网站
学院地址:上海中山北路3663号理科大楼
上海市浦东新区楠木路111号
院长信箱:yuanzhang@sei.ecnu.edu.cn | 办公邮箱:office@sei.ecnu.edu.cn | 院办电话:021-62232550
Copyright Software Engineering Institute